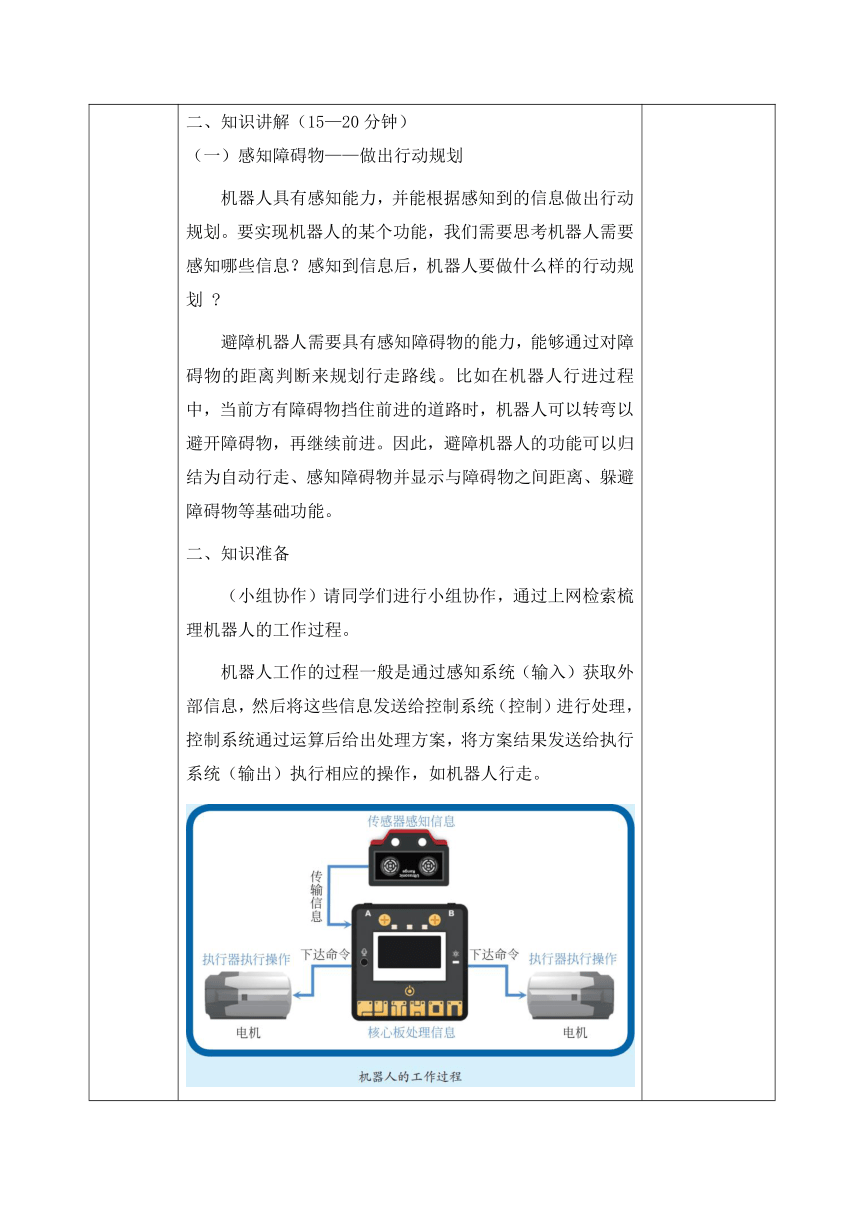
資源簡介 第二課 《避障機器人——感知障礙與行動規劃》 教案教學時間 教學班級 五年級課程名稱 避障機器人 課時 1-2課時教學目標 一、知識與技能 1.理解實現避障的原理。 2.了解實現控制的硬件器材。 3.實現避障的程序代碼。 二、過程與方法 1.通過講授和展示的方式,讓學生了解機器人的工作過程。 2.通過實操,實現避障程序設計,鍛煉學生的動手能力、邏輯思維能力。 三、情感態度與價值觀 1.通過本節課學習,使學生認識知識檢索。重點 1.理解避障的原理。 2.了解機器人的工作過程。難點 1.實現避障的程序代碼。教具 WPS軟件、機器人。教學方法 教學展示、小組討論、興趣驅動。教學過程 教師 學生一、導入(6分鐘) 同學們,歡迎大家來到知識大講堂。 (提問)生活中的避障機器人的應用有很多,請大家以掃地機器人為例,說一說它是怎么工作的呢? 學生思考并回答問題知識講解(15—20分鐘) (一)感知障礙物——做出行動規劃 機器人具有感知能力,并能根據感知到的信息做出行動規劃。要實現機器人的某個功能,我們需要思考機器人需要感知哪些信息?感知到信息后,機器人要做什么樣的行動規劃 避障機器人需要具有感知障礙物的能力,能夠通過對障礙物的距離判斷來規劃行走路線。比如在機器人行進過程中,當前方有障礙物擋住前進的道路時,機器人可以轉彎以避開障礙物,再繼續前進。因此,避障機器人的功能可以歸結為自動行走、感知障礙物并顯示與障礙物之間距離、躲避障礙物等基礎功能。 二、知識準備 (小組協作)請同學們進行小組協作,通過上網檢索梳理機器人的工作過程。 機器人工作的過程一般是通過感知系統(輸入)獲取外部信息,然后將這些信息發送給控制系統(控制)進行處理,控制系統通過運算后給出處理方案,將方案結果發送給執行系統(輸出)執行相應的操作,如機器人行走。 機器人的感知系統通常是各種傳感器,這些傳感器就相當于機器人的眼、耳、口、鼻。根據功能的不同進行分類,常見的機器人傳感器有哪些?上網檢索一下。 避障機器人可以使用超聲波傳感器作為感知系統,當感知到前面有障礙物時,會將障礙物與機器人之間的距離數據發送給控制系統,控制系統做出相應處理。在這里超聲波就相當于避障機器人的眼睛。超聲波傳感器是將超聲波信號轉換成其他信號(通常是電信號)的傳感器。超聲波傳感器的工作原理是從發射探頭發射超聲波,超聲波會在空氣中傳播,當遇到障礙物時會將超聲波反彈回來,根據發射和接收的時間差及聲波的傳輸速度,從而計算出超聲波與障礙物之間的距離。 通常情況下,機器人行走有前進、后退、左轉、右轉和停止等情況。以輪式機器人為例,當左、右兩個輪子以同樣的速度往同一個方向轉動時,機器人就前進或后退(由于左、右兩個輪子在機器人上往往是對稱安裝的,所以兩個輪子通常轉向相反,才能實現往同一方向轉動)。當兩個輪子的轉速存在差別時,機器人就會轉彎,即當左輪慢(停),右輪快時,機器人就左轉;當左輪快,右輪慢(停)時,機器人就右轉。當左、右兩個輪子停止轉動時,機器人就停止。 (提問)現在大家自己動手操作一下,怎么實現機器人不同的行進狀態吧? 三、器材準備 要實現避障機器人的相關功能,同學們會選擇哪些器材呢?分析了機器人的功能之后,根據機器人的功能準備相關器材。如避障機器人感知障礙物用什么感知設備可以實現呢?常見的有超聲波傳感器、雷達傳感器、紅外探測傳感器、攝像頭等。避障機器人的行走功能用到什么設備來實現,需要根據機器人的形態來定,例如輪式機器人可以使用電機來實現行走,像雙足、四足等機器人可以使用舵機等設備來執行行走的功能。三、實操練習(10—15分鐘) 現在大家已經選好了器材,怎么實現避障機器人的功能,大家小組合作動手做一做吧。 (學生自己做,老師巡查,并且負責解決學生創作過程當中遇到的問題) 學生:小組探究,實踐練習。四、課堂總結(5分鐘) 老師看了同學們完成的作品,都很棒,看來大家對于今天的知識點都掌握得很好。接下來同學們打開老師發下的評價量表,認真閱讀今天的學習內容,對今天的學習情況做一個簡單的記錄,直接選擇對應選項即可。 (提問)最后,請一位同學總結一下,我們今天這節課,都學習到了哪些知識點呢? 不錯,大家都學習得很認真,掌握了今天這節課的知識。 這堂課中,我們首先了解了機器人感知信息并做出行動規劃的過程。其次,理解了機器人的工作過程。最后,還了解了機器人常用的傳感器,實現了避障機器人的制作。 今天這節課就到這里了,同學們再見! 老師加以引導學生,自行總結教學 反思 展開更多...... 收起↑ 資源預覽 縮略圖、資源來源于二一教育資源庫
 資源預覽
資源預覽

 資源預覽
資源預覽