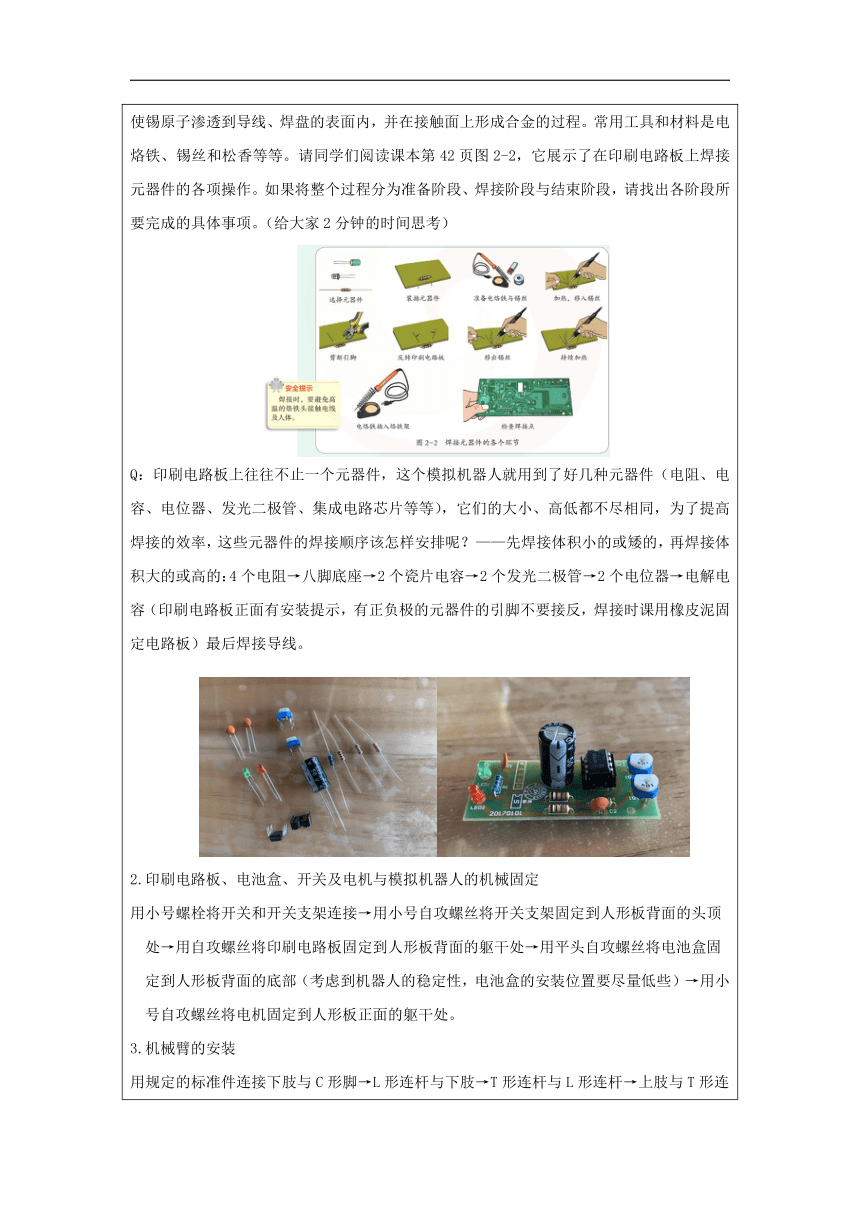
資源簡介 教學設計課程基本信息學科 通用技術 年級 高二 學期 秋季課題 感知生活、生產中的流程教學目標1.通過技術體驗和案例分析,闡述流程及其環節、時序的含義。 2.能運用流程原理和方法進行簡單的技術設計活動,嘗試解決技術問題(工程思維)。教學內容教學重點:理解流程及其環節、時序的含義。教學難點:根據某項技術活動中給定的環節,安排出合理的流程。教學過程【走進情境】今天老師給大家帶來了一款小玩具——模擬機器人(圖片或視頻展示) Q:你知道它剛買來的時候是什么樣子的么?(圖片展示) Q:那你知道怎樣才能將這一堆零部件組裝起來么?——肯定會有同學想:“找一找里面有沒有說明書?先搞清楚各個零部件的名稱和功能,相互之間按照什么方式連接,要用到哪些連接件或緊固件?最后安排一個合理的順序將所有零部件組裝起來。”——思路很清晰!那我們就按照這個思路進行模擬機器人的組裝。 【技術體驗】組裝模擬機器人 在認真閱讀了說明書后,我們了解到模擬機器人整體的組裝可以分成三大步:1.印刷電路板上各個電子元器件及導線的焊接→2.印刷電路板、電池盒、開關及電機與模擬機器人的機械固定→3.機械臂的安裝 1.印刷電路板上各個電子元器件及導線的焊接 電子元器件的焊接常用錫焊,錫焊是指通過加熱,讓錫焊料在焊接面上熔化、流動、浸潤,使錫原子滲透到導線、焊盤的表面內,并在接觸面上形成合金的過程。常用工具和材料是電烙鐵、錫絲和松香等等。請同學們閱讀課本第42頁圖2-2,它展示了在印刷電路板上焊接元器件的各項操作。如果將整個過程分為準備階段、焊接階段與結束階段,請找出各階段所要完成的具體事項。(給大家2分鐘的時間思考) Q:印刷電路板上往往不止一個元器件,這個模擬機器人就用到了好幾種元器件(電阻、電容、電位器、發光二極管、集成電路芯片等等),它們的大小、高低都不盡相同,為了提高焊接的效率,這些元器件的焊接順序該怎樣安排呢?——先焊接體積小的或矮的,再焊接體積大的或高的:4個電阻→八腳底座→2個瓷片電容→2個發光二極管→2個電位器→電解電容(印刷電路板正面有安裝提示,有正負極的元器件的引腳不要接反,焊接時課用橡皮泥固定電路板)最后焊接導線。 2.印刷電路板、電池盒、開關及電機與模擬機器人的機械固定 用小號螺栓將開關和開關支架連接→用小號自攻螺絲將開關支架固定到人形板背面的頭頂處→用自攻螺絲將印刷電路板固定到人形板背面的軀干處→用平頭自攻螺絲將電池盒固定到人形板背面的底部(考慮到機器人的穩定性,電池盒的安裝位置要盡量低些)→用小號自攻螺絲將電機固定到人形板正面的軀干處。 3.機械臂的安裝 用規定的標準件連接下肢與C形腳→L形連桿與下肢→T形連桿與L形連桿→上肢與T形連桿→L形連桿和曲柄→上肢與人形板(兩側緊固件的松緊程度要一致)(展示安裝視頻) 機器人組裝好后,裝上電池,打開開關,檢測機器人能否正常行走。 【總結提煉】 通過組裝模擬機器人,我們體會到:一項具體的技術活動,為了達成最終目的,需要按照一定的順序進行。這個順序就叫做流程。 流程中的若干階段叫做環節。在模擬機器人的組裝流程中,我們一開始是這樣劃分環節的:“1.印刷電路板上各個電子元器件及導線的焊接→2.印刷電路板、電池盒、開關及電機與模擬機器人的機械固定→3.機械臂的安裝”,其中每個環節又可以分解成若干更小的環節(如:焊接元器件時,按照“1.選擇元器件→2.準備電烙鐵與錫絲→3.裝插元器件→4.反轉印刷電路板→5.加熱,移入錫絲→6.移出錫絲→7.持續加熱→8.電烙鐵插入烙鐵架→9.剪斷引腳→10.檢查焊接點”的順序來進行)。由此可見,環節的劃分可大可小,根據不同的需要可以有不同的劃分方法。 環節在時間上的先后順序叫做時序。在模擬機器人的組裝流程中,有些環節之間是可以顛倒的,比如:在安裝固定開關、電路板、電池盒、電機的時候,到底先安裝背面還是正面,誰先誰后并沒有太大影響,但我們也要法分析和比較來進行適當的安排,考慮到背面安裝的東西比較多,所以我們安排先安裝背面的。但是有些環節之間是不可以顛倒的,如:焊接時先焊接體積小的或矮的,再焊接體積大的或高的。如果時序顛倒,就會導致體積小的或矮的元器件安插不牢固。再比如,用導線連接開關、電路板、電池盒、電機的時候,要先檢查是否連對,再進行焊接。如果時序顛倒,很可能會導致電機反轉、機器人倒著走的后果,后期還要返工,很麻煩。 時序是否可以顛倒,是根據事物本身內在的機理來決定的。如果后項任務是以前一項任務的完成作為條件的,或者一項任務的完成會對另一項任務產生較大的負面影響時,時序就不能顛倒。我們應該尊重和遵循這些規律或機理。 我們再來看一個案例:課本第43頁不同類型臺鉆的操作流程。圖丙所示的臺鉆,其操作的部分流程如下:打開防護罩→裝鉆頭→合上防護罩→啟動電機→鉆孔。其中的“合上防護罩”和“啟動電機”環節如果顛倒的話,防護罩就起不到安全保護作用了。所以設計流程時,如果防護罩沒有合上,電機就無法啟動。這就是不可顛倒的時序,體現了安全至上的現代設計理念。 【本課小結】本課我們通過組裝模擬機器人的技術體驗以及有安全保護功能的臺鉆操作流程的案例分析,理解了流程及其環節、時序的含義。并初步體會到了流程在我們生活、生產中的重要性,沒有合理的流程,就無法順利、安全地進行技術活動。 展開更多...... 收起↑ 資源預覽 縮略圖、資源來源于二一教育資源庫
 資源預覽
資源預覽
 資源預覽
資源預覽