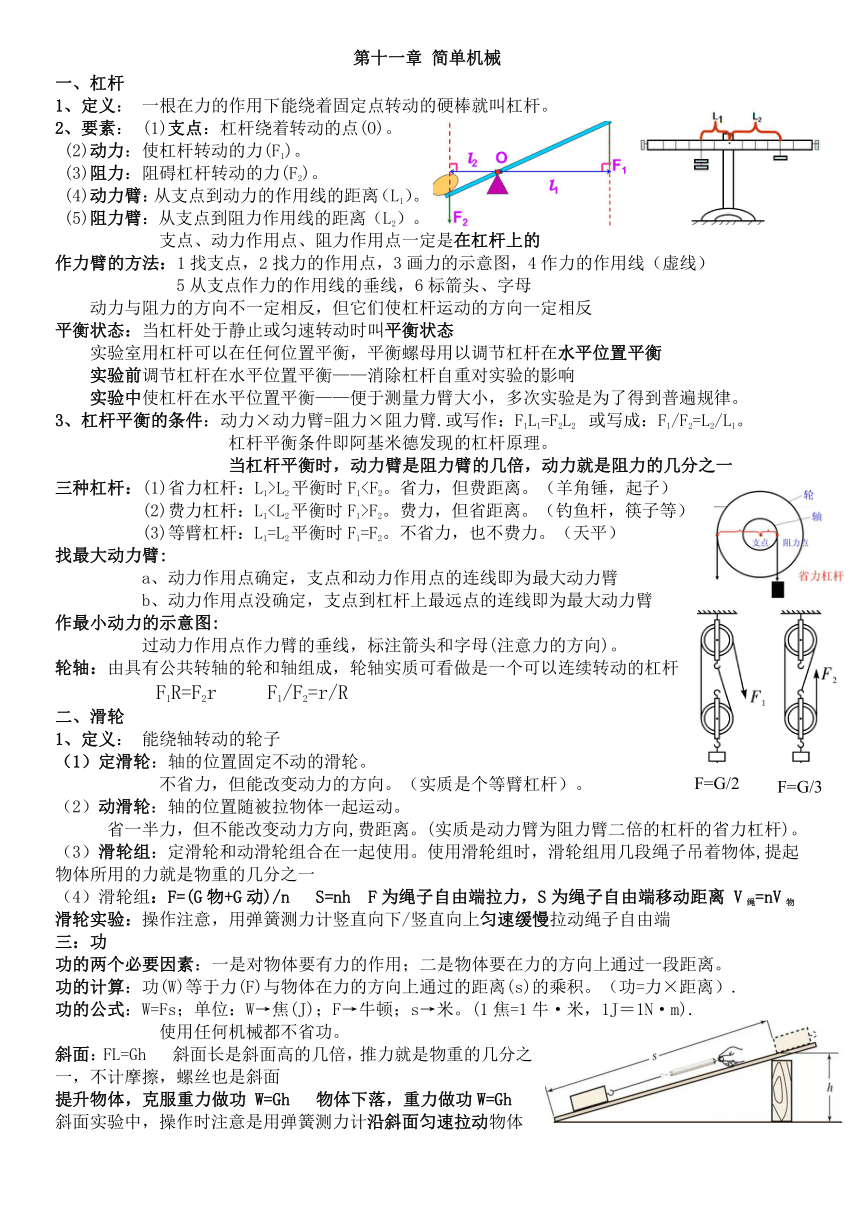
資源簡介 第十一章 簡單機械一、杠桿1、定義: 一根在力的作用下能繞著固定點轉動的硬棒就叫杠桿。2、要素: (1)支點:杠桿繞著轉動的點(O)。(2)動力:使杠桿轉動的力(F1)。(3)阻力:阻礙杠桿轉動的力(F2)。(4)動力臂:從支點到動力的作用線的距離(L1)。(5)阻力臂:從支點到阻力作用線的距離(L2)。支點、動力作用點、阻力作用點一定是在杠桿上的作力臂的方法:1找支點,2找力的作用點,3畫力的示意圖,4作力的作用線(虛線)5從支點作力的作用線的垂線,6標箭頭、字母動力與阻力的方向不一定相反,但它們使杠桿運動的方向一定相反平衡狀態:當杠桿處于靜止或勻速轉動時叫平衡狀態實驗室用杠桿可以在任何位置平衡,平衡螺母用以調節杠桿在水平位置平衡實驗前調節杠桿在水平位置平衡——消除杠桿自重對實驗的影響實驗中使杠桿在水平位置平衡——便于測量力臂大小,多次實驗是為了得到普遍規律。3、杠桿平衡的條件:動力×動力臂=阻力×阻力臂.或寫作:F1L1=F2L2 或寫成:F1/F2=L2/L1。杠桿平衡條件即阿基米德發現的杠桿原理。當杠桿平衡時,動力臂是阻力臂的幾倍,動力就是阻力的幾分之一三種杠桿:(1)省力杠桿:L1>L2平衡時F1(2)費力杠桿:L1F2。費力,但省距離。(釣魚桿,筷子等)(3)等臂杠桿:L1=L2平衡時F1=F2。不省力,也不費力。(天平)找最大動力臂:a、動力作用點確定,支點和動力作用點的連線即為最大動力臂b、動力作用點沒確定,支點到杠桿上最遠點的連線即為最大動力臂作最小動力的示意圖:過動力作用點作力臂的垂線,標注箭頭和字母(注意力的方向)。輪軸:由具有公共轉軸的輪和軸組成,輪軸實質可看做是一個可以連續轉動的杠桿F1R=F2r F1/F2=r/R二、滑輪1、定義: 能繞軸轉動的輪子(F=G/3) (F=G/2)(1)定滑輪:軸的位置固定不動的滑輪。不省力,但能改變動力的方向。(實質是個等臂杠桿)。動滑輪:軸的位置隨被拉物體一起運動。省一半力,但不能改變動力方向,費距離。(實質是動力臂為阻力臂二倍的杠桿的省力杠桿)。滑輪組:定滑輪和動滑輪組合在一起使用。使用滑輪組時,滑輪組用幾段繩子吊著物體,提起物體所用的力就是物重的幾分之一滑輪組:F=(G物+G動)/n S=nh F為繩子自由端拉力,S為繩子自由端移動距離 V繩=nV物滑輪實驗:操作注意,用彈簧測力計豎直向下/豎直向上勻速緩慢拉動繩子自由端三:功功的兩個必要因素:一是對物體要有力的作用;二是物體要在力的方向上通過一段距離。功的計算:功(W)等于力(F)與物體在力的方向上通過的距離(s)的乘積。(功=力×距離).功的公式:W=Fs;單位:W→焦(J);F→牛頓;s→米。(1焦=1牛·米,1J=1N·m).使用任何機械都不省功。斜面:FL=Gh 斜面長是斜面高的幾倍,推力就是物重的幾分之一,不計摩擦,螺絲也是斜面提升物體,克服重力做功 W=Gh 物體下落,重力做功W=Gh斜面實驗中,操作時注意是用彈簧測力計沿斜面勻速拉動物體四:功率功率只能表示機械做功的快慢,不能說明機械做功的多少。定義:功與做功所用時間的比 P=W/t 單位是J/s 專門單位W(瓦特) 1W=1J/s千瓦與兆瓦:1kW=1000W 1MW=103kW馬力:1min內把約15t物體舉高月0.3m所需的功率1馬力=1500kg×9.8N/kg×0.3m/60s = 735W五:機械效率有用功:我們的目的,我們所需要做的功額外功:并非我們所需,但又不得不做的功(一定小于100%)總 功:總功等于有用功和額外功之和W總=W有用+W額外對于滑輪組:有用功是把物體提升相應高度而做的功W有用= Gh總功即作用在繩子自由端的力與繩子自由端移動距離的乘積W總= FS=Fnh提高機械效率的方法:減輕滑輪與繩子自重、減小摩擦(此兩點旨在減少額外功),增加物重(提高有用功占比)補充:滑輪組的機械效率與提升的速度無關,與提升的高度無關,與滑輪組繞繩方式無關。公式匯總:杠桿平衡條件F1L1=F2L2F1/F2=L2/L1輪軸:F1R=F2r F1/F2=r/R滑輪 F=(G物+G動)/n S=nh V繩=nV物 n:與動滑輪接觸繩子股數(對于滑輪組:=00%)功計算公式 W=FS 單位:J 變形:F=W/S S=W/F重力做功或克服重力做功:W=Gh功率 W=Pt 單位:W 1W=1J/S 變形:P=W/t t=W/PP=W/t=FS/t=FV(F為動力,V為速度) F=P/V V=P/F機械效率變形:W有=ηW總 W總=W有/η對于滑輪組η=G/nF η=G/(G+G動) η=G/nf如圖1請作出物體A所受重力的示意圖和使杠桿在圖示位置平衡的最小力F(保留作圖痕跡)。(F)(作圖F=f/2) (圖3) (圖2) (圖1)如圖2標出支點O,并作出動力臂。(作圖F=f/3)如圖3標出支點O,并作出力臂。 展開更多...... 收起↑ 資源預覽 縮略圖、資源來源于二一教育資源庫
 資源預覽
資源預覽
 資源預覽
資源預覽